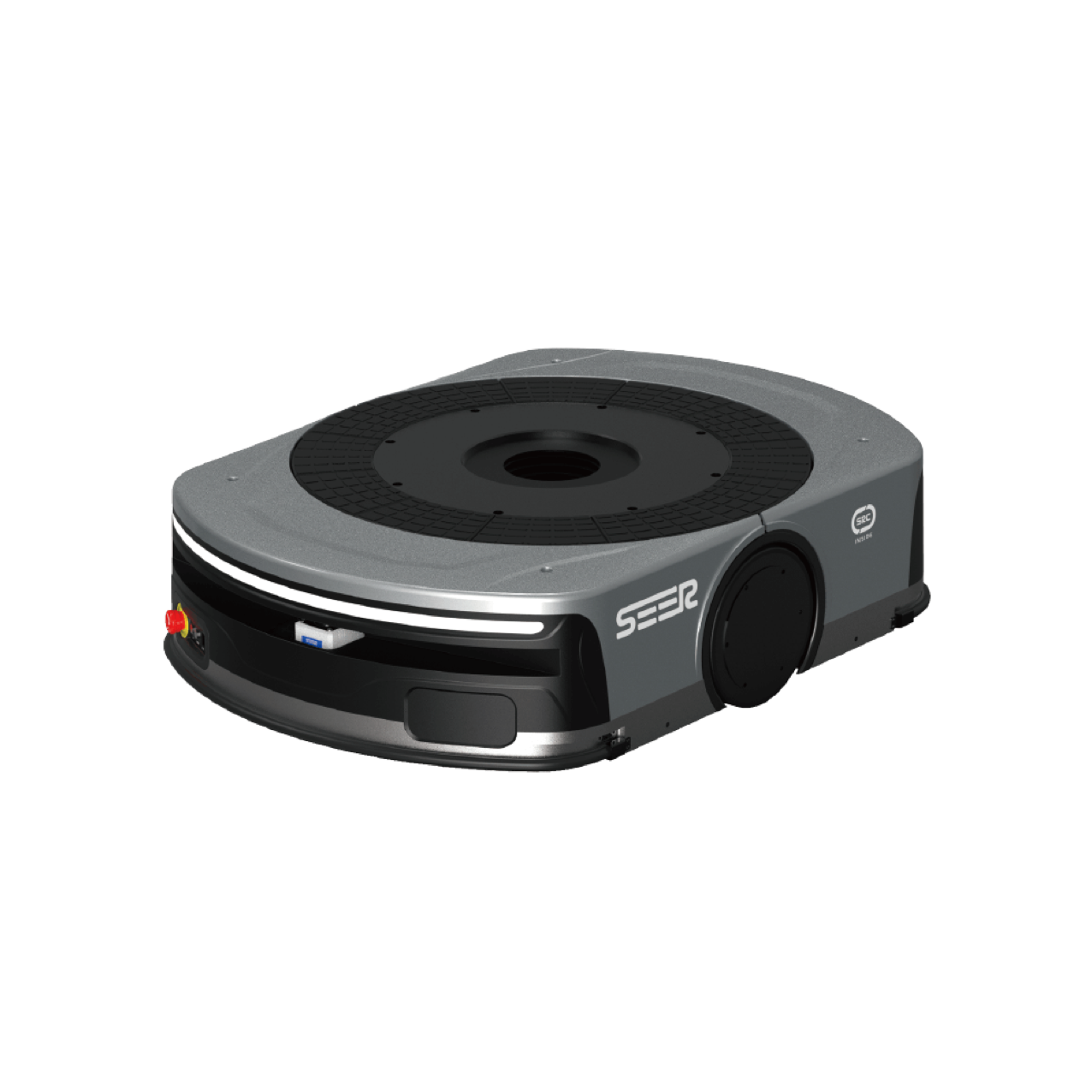
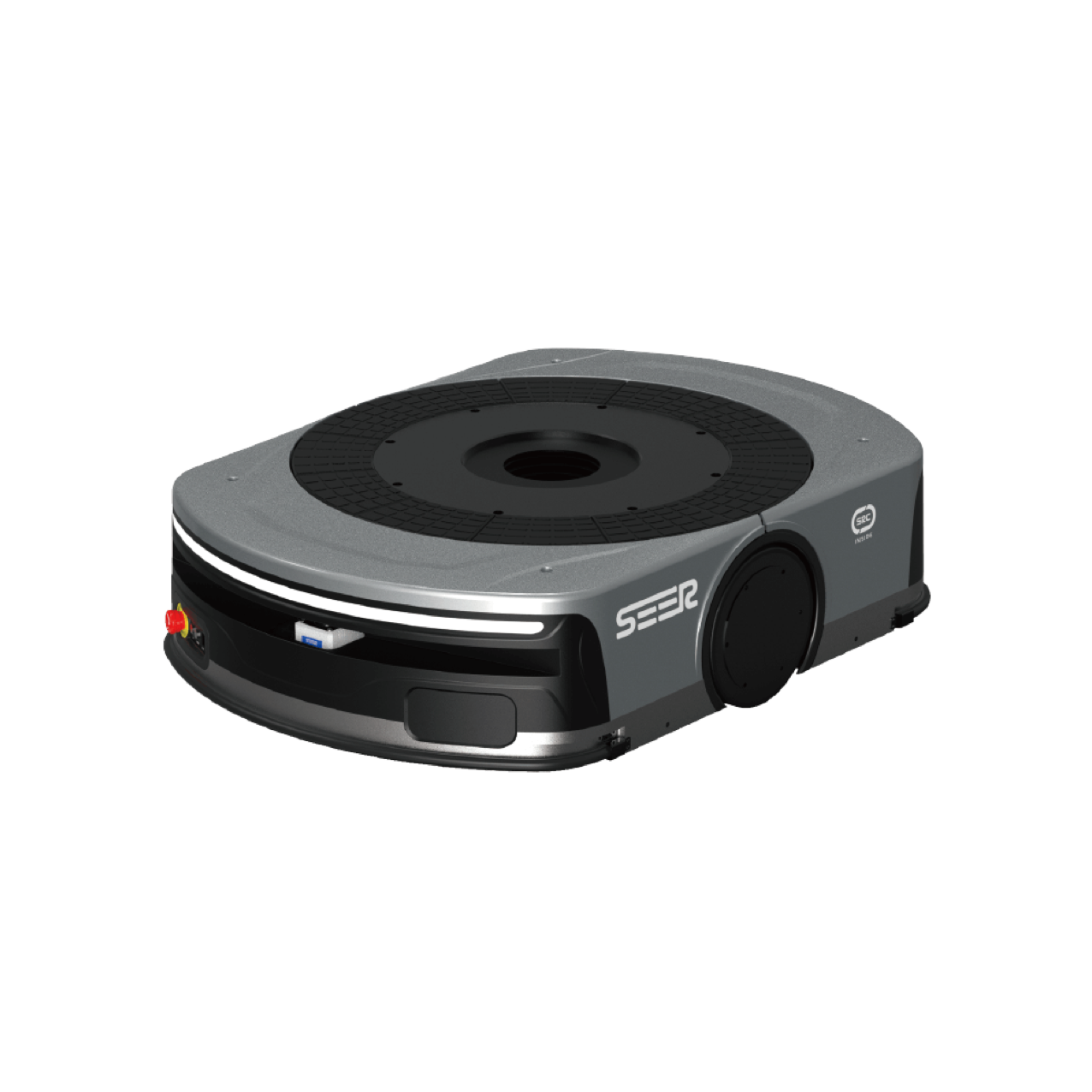
HYSEROBOTTES – Roterende Hysrobot AMB-800K

Hoofkategorie
AGV AMR / hefmeganisme AGV AMR / AGV outomatiese begeleide voertuig / AMR outonome mobiele robot / AGV AMR motor vir industriële materiaalhantering / Chinese vervaardiger AGV robot / pakhuis AMR / AMR hefmeganisme laser SLAM navigasie / AGV AMR mobiele robot / AGV AMR onderstel laser SLAM navigasie / intelligente logistieke robot
Toepassing

AMB-reeks onbemande onderstel AMB (Auto Mobile Base) vir AGV outonome voertuie, 'n universele onderstel wat ontwerp is vir AGV outonome begeleide voertuie, bied 'n paar funksies soos kaartredigering en lokaliseringsnavigasie. Hierdie onbemande onderstel vir AGV-karretjie bied oorvloedige koppelvlakke soos I/O en CAN om verskeie boonste modules saam met kragtige kliëntsagteware en versendingstelsels te monteer om gebruikers te help om vinnig die vervaardiging en toepassing van AGV outonome begeleide voertuie te voltooi. Daar is vier monteringsgate bo-op die AMB-reeks onbemande onderstel vir AGV outonome begeleide voertuie, wat arbitrêre uitbreiding met domkrag, rollers, manipulators, latente trekkrag, vertoon, ens. ondersteun om veelvuldige toepassings van een onderstel te bereik. AMB, tesame met SEER Enterprise Enhanced Digitalization, kan die verenigde versending en ontplooiing van honderde AMB-produkte gelyktydig realiseer, wat die intelligente vlak van interne logistiek en vervoer in die fabriek aansienlik verbeter.
Kenmerk
· Gegradeerde las: 800 kg
· Looptyd: 8 uur
· Lidar-nommer: 1
· Rotasiediameter: 980 mm
· Navigasiespoed: ≤1.8m/s
· Posisioneringsakkuraatheid: ±5, ±0.5 mm
● Dunner lyf vir meer rakdraende scenario's
Dit is slegs 245 mm hoog vir meer rakdraende scenario's.
● 360° rotasie, buigsaam vir optel, aflaai en dra
Die stuur van die robotliggaam en die opgekrikde goedere kan beheer word om maklik nou ruimtes, areas met digte rakke en so aan te hanteer.
Navigasie-akkuraatheid kan ±5 mm bereik. Ondersteun verskeie navigasiemetodes, soos SLAM-, QR-kode- en reflektornavigasie, om aan verskeie vereistes in verskillende scenario's te voldoen.
● 800 kg Dravermoë vir Maklike Dra
Laaivermoë van 800 kg vir die dra van vragte in 'n verskeidenheid scenario's, insluitend e-handelspluk, materiaaloordrag, oproepaflewering en ander produksies.
● 2.2 m/s Loopspoed, vinniger en meer doeltreffend
Vollading met 'n maksimum loopspoed van 1.8 m/s en geen lading met 'n maksimum loopspoed van 2.2 m/s. Vinnige optel/aflaai van goedere in 2.5±0.5 s.



Spesifikasieparameter
| Produknaam | AMB-300JZ | AMB-JS | AMB-800K | |
| asicparameters | Navigasiemetode | Laser SLAM | Laser SLAM | Laser SLAM |
| Rymodus | Tweewiel-ewenaar | Tweewiel-ewenaar | Tweewiel-ewenaar | |
| Dopkleur | Koel Grys | Koel Grys | Swart en grys | |
| L*B*H (mm) | 792*580*250 | 1330*952*290 | 980*680*245 | |
| Rotasiediameter (mm) | 910 | 1460 | 980 | |
| Gewig (met battery) (kg) | 150 | 265 | 150 | |
| Laaivermoë (kg) | 300 | 500/1000 | 800 | |
| Afmetings van die domkragplatform (mm) | 760*545 | 1300*920 | φ640 | |
| Maksimum hyshoogte (mm) | 60±2 | 60±1 | 60±2 | |
| Prestasie parameters | Minimum deurlaatbare breedte (mm) | 640 | 1050 | 820 |
| Navigasieposisie akkuraatheid (mm) * | ±5 | ±5 | ±5 | |
| Navigasiehoek akkuraatheid (°) * | ±0.5 | ±1 | ±0.5 | |
| Navigasiespoed (m/s) | ≤1.5 | ≤1.5 | ≤1.8 | |
| Batteryparameters | Batteryspesifikasies (V/Ah) | 48/20 (Litium Yster Fosfaat) | 48/40 (Litium Yster Fosfaat) | 48/27 (Litium Yster Fosfaat) |
| Omvattende batterylewe (u) | 8 | 7 | 8 | |
| Outomatiese laaiparameters (V/A) | 54.6/15 | 54.6/40 | 54.5/15 | |
| Laaityd (10-80%) (u) | ≤1 | ≤2 | ≤2 | |
| Laaimetode | Handmatig/Outomaties | Handmatig/Outomaties | Handmatig/Outomaties | |
| Konfigurasies | Lidar-nommer | 2(SICK nanoScan3+GRATIS C2) of 2(GRATIS H1+GRATIS C2) | 2 (SICK nanoScan3) | 1 (SICK nanoScan3 Core) of 1 (OLEILR-1BS5H) |
| Aantal lae-posisie obstruksievermydingsfoto-elektriese | 0 | - | 0 | |
| Vragopsporing | - | 〇 | - | |
| Noodstopknoppie | ● | ● | ● | |
| Spreker | ● | ● | ● | |
| Atmosfeerlig | ● | ● | ● | |
| Bumperstrook | ● | ● | ● | |
| Funksies | Wi-Fi-swerwing | ● | ● | ● |
| Outomatiese laai | ● | ● | ● | |
| Rakherkenning | ● | ● | ● | |
| Draai | - | - | ● | |
| Presiese ligging met QR-kode | 〇 | - | 〇 | |
| QR-kode navigasie | 〇 | - | 〇 | |
| Laserreflektor-navigasie | 〇 | 〇 | 〇 | |
| Sertifisering | EMC/ESD | - | ● | - |
| VN38.3 | - | ● | ● | |
* Navigasie-akkuraatheid verwys gewoonlik na die herhaalbaarheidsakkuraatheid waarmee 'n robot na die stasie navigeer.
● Standaard 〇 Opsioneel Geen
Ons Besigheid







